
Robot công nghiệp (Industrial robots) được sử dụng nhiều nhất trong các nhà máy sản xuất tự động bao gồm: robot có khớp nối (loại thông dụng nhất), SCARA robot và gantry robot (thường gọi là robot tọa độ đề-cac hay robot x-y-z).
Đa số các robot công nghiệp đều được phân chia theo đặc tính của tay robot. Các robot thông dụng nhất hiện nay là robot có khớp nối (Articulated robot). Theo dõi để không bỏ lỡ những nội dung quan trọng trong bài viết dưới đây của Myrobot.
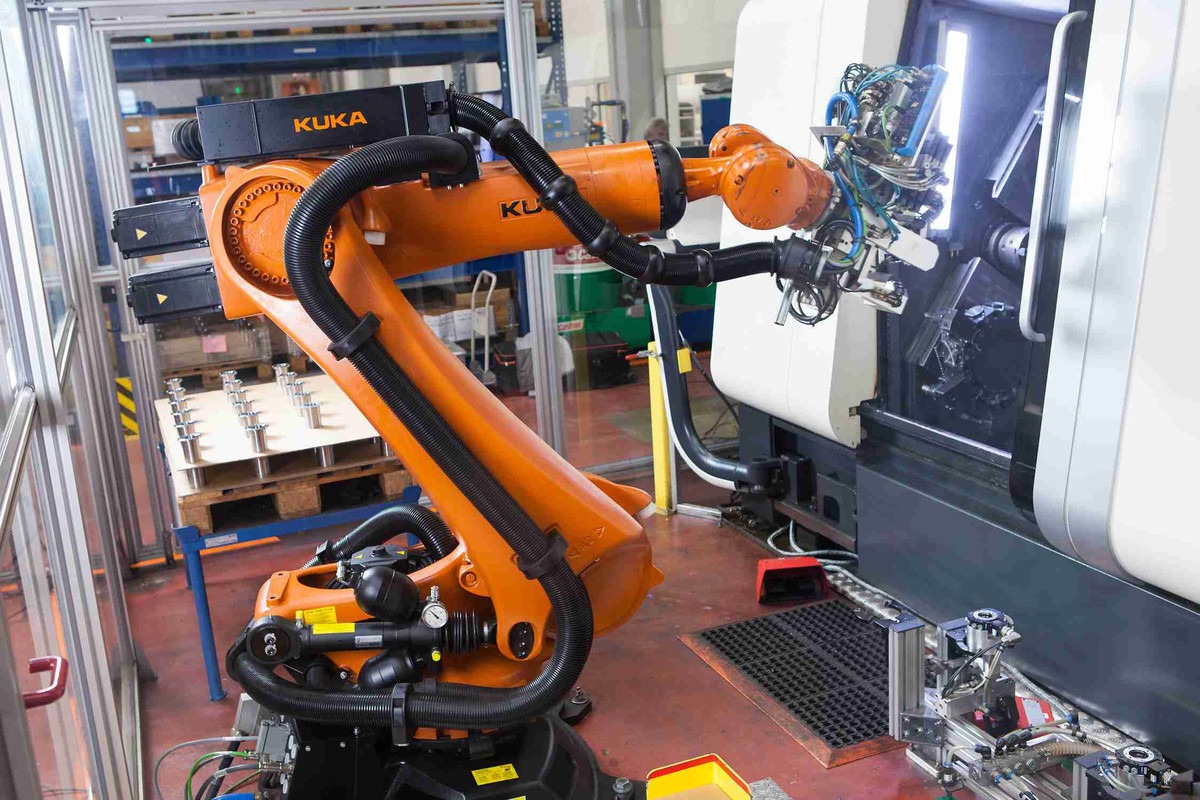
ROBOT CÓ KHỚP NỐI LÀ GÌ?
Là robot có những khớp quay. Robot có khớp có thể có hai kết cấu nối với nhau rất đơn giản đến những hệ thống có tới hơn 10 kết cấu tương tác với nhau. Chúng có thể dùng để nhấc các chi tiết nhỏ với độ chính xác cực cao. Các robot thường được dùng để làm các nhiệm vụ như hàn, cắt, sơn, lắp ráp, gắp chi tiết, đánh bóng,v.v …
MỘT SỐ THUẬT NGỮ ROBOT CÔNG NGHIỆP
Number of Axes (Số Lượng Trục)
Cần có ít nhất hai trục để đi đến bất kỳ một điểm nào trên mặt phẳng. Ba trục là ít nhất để đi đến bất kỳ một điểm nào trong không gian. Để có thể điều khiển một cách toàn diện sự di chuyển ở điểm cuối của tay robot (cổ tay robot) cần phải có thêm 3 trục nữa (xoay, dốc và trệch – roll, pitch, yaw) .
Carrying Capacity (Tải Trọng)
Khối lượng mà robot có thể nâng
Kinematic (Động Học)
Sự sắp xếp thực tế của các kết cấu cứng và các khớp trong robot công nghiệp quyết đinh khả năng di chuyển của robot. Robot được chia theo động học thành các loại Robot có khớp, Robot đề các, song song và SCARA
Speed (Tốc Độ)
Tốc độ robot di chuyển phần cuối của tay( cổ tay robot)
Working Envelope (Tầm Hoạt Động)
Tầm không gian xa nhất mà robot có thể “với” tới.
Xem thêm: CÁNH TAY ROBOT VÀ NHỮNG ĐỀU CẦN BIẾT
Accuracy (Độ Chính Xác)
Độ chính xác khi di chuyển đến 1 điểm bất kỳ được ra lệnh. Độ chính xác có thể khác nhau khi ở những tốc độ và vị trí khác nhau trong cùng một tầm hoạt động.
Motion Control (Kiểm Soát Di Chuyển)

Trong một số ứng dụng ví dụ như những ứng dụng gắp – đặt đơn giản. Robot công nghiệp chỉ di chuyển lặp đi lặp lại đơn thuần đến một số điểm đã được lập trình sẵn. Với những ứng dụng phức tạp hơn, ví dụ như hàn hồ quang, phải có sự kiểm soát di chuyển liên tục để robot di chuyển theo các đường trong không gian.
Power Source (Nguồn)
Một số robot dùng động cơ điện, một số khác dùng động cơ thủy lực. Loại dùng động cơ điện thì nhanh hơn. Robot dùng động cơ thuỷ lực thì mạnh hơn và có ưu thế hơn trong một số ứng dụng như phun sơn, khi mà tia lửa điện có thể gây nổ.
Drive (Truyền Động)
Một số robot kết nối động cơ với các khớp qua các thiết bị, một số khác kết nối thẳng động cơ vào các khớp.
Nguồn bài viết: Tham khảo từ internet
XEM THÊM: CÁNH TAY ROBOT CÔNG NGHIỆP
MYROBOT - Chúng tôi là chuyên gia trong mảng sản xuất, cung cấp và phân phối các hệ thống thiết bị robot phục vụ công nghiệp...Được khách hàng tin dùng tại Việt Nam.![]()
Bài viết liên quan
Robot Palletizing – Cánh tay đắc lực trong bốc xếp bao thành phẩm tại các nhà máy
Khẳng định rằng, trong bối cảnh công nghệ 4.0 bùng nổ Robot Palletizing đã thực [...]
Th4
Hệ thống Robot bốc xếp hàng, giải pháp tự động hóa Logistics
Hệ thống Robot bốc xếp hàng tự động hiện đang là giải pháp tiên phong [...]
Th4
Hệ thống robot bốc xếp bao lên pallet tự động
Trong kỷ nguyên công nghệ 4.0, hệ thống robot bốc xếp bao lên pallet tự [...]
Th4
CYBER1 Dog – Chó robot công nghiệp cho giám sát, tuần tra và chữa cháy hiện đại
Trong cuộc cách mạng công nghiệp 4.0, sự xuất hiện của các thiết bị tự [...]
Th3
Ứng dụng cobot AUBO i3 trong cửa hàng tiện lợi & thức ăn nhanh hiệu quả
Trong bối cảnh ngành bán lẻ và F&B đang chuyển mình mạnh mẽ theo xu [...]
Th3
Robot Lễ Tân Và Giao Hàng Chuyên Nghiệp Cho Nhà Hàng
Trong thời đại công nghệ 4.0, việc ứng dụng robot vào ngành dịch vụ đang [...]
Th10