
Cánh tay robot gắp sản phẩm đang nổi lên như một giải pháp tối ưu, kết hợp hoàn hảo giữa tốc độ, độ chính xác và tính linh hoạt. Với khả năng gắp, di chuyển và đặt sản phẩm nhanh chóng, chính xác gần. Robot thay thế hiệu quả sức lao động thủ công và tối ưu chi phí vận hành, nâng cao năng suất và đảm bảo chất lượng đồng đều ở mọi công đoạn.
Robotic Pick & Place là gì?
Robotic Pick & Place, hay còn gọi là cánh tay robot gắp sản phẩm, là hệ thống robot được thiết kế thông minh. Được dùng để thực hiện tự động thao tác lấy (pick) và đặt (place) sản phẩm từ vị trí này sang vị trí khác một cách nhanh chóng và chính xác.
Có loại robot cố định (cánh tay robot trong dây chuyền sản xuất) và robot di động (tích hợp hệ thống gắp và di chuyển trong kho). Nhờ sự kết hợp giữa phần mềm điều khiển, trí tuệ nhân tạo (AI) và công nghệ thị giác máy. Robot có khả năng nhận diện đối tượng, tối ưu hóa lộ trình di chuyển, và xử lý sản phẩm với độ chính xác cao. Kể cả trong môi trường sản xuất tốc độ cao hoặc đòi hỏi tính linh hoạt.
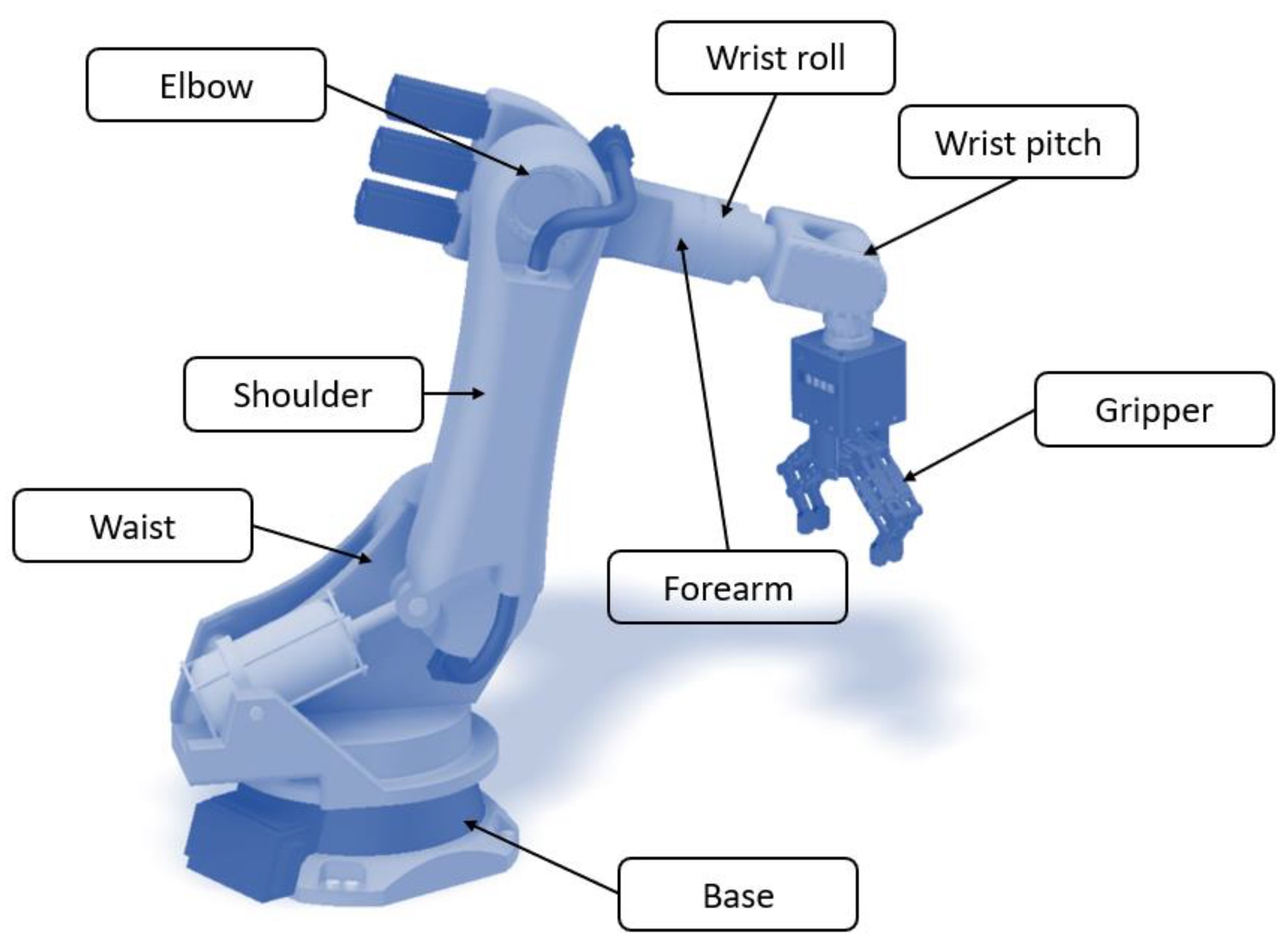
Cấu tạo chính của cánh tay Robot gắp sản phẩm
Xem nhanh top 6 robot công nghiệp tốt được nhiều người tin dùng tại Myrobot










Thân robot (bộ phận cánh tay)
Đây là phần “khung xương” và “cơ bắp” của robot, gồm chuỗi các khớp nối và liên kết cơ khí. Cho phép cánh tay xoay, uốn và vươn tới nhiều vị trí trong không gian làm việc.
Khớp nối (Joints): Hoạt động tương tự khớp xương ở con người, quyết định mức độ linh hoạt (số trục – degrees of freedom). Robot 4 trục thường dùng cho tác vụ đơn giản, trong khi robot 6 trục phổ biến nhất, khả năng tiếp cận từ mọi hướng.
Cấu trúc cơ khí: Làm từ vật liệu bền như thép, nhôm, đảm bảo độ cứng và khả năng chịu tải. Bên trong chứa động cơ, hộp số và cơ cấu truyền động để vận hành trơn tru, chính xác.
Bộ phận gắp vật thể (End-effector / Gripper)
Hiểu như “bàn tay” của robot, gắn ở đầu cánh tay và trực tiếp tương tác với sản phẩm. Tùy chọn phụ thuộc vào hình dạng, kích thước, trọng lượng và chất liệu sản phẩm. Chẳng hạn:
Kẹp cơ khí: 2 ngón (phổ biến), 3 ngón hoặc đa ngón cho vật thể tròn hoặc hình dạng phức tạp.
Kẹp chân không: Dùng giác hút để nâng vật phẳng, nhẵn hoặc mỏng (tấm kim loại, hộp carton…).
Kẹp từ tính: Gắp sản phẩm kim loại nhiễm từ, không yêu cầu bề mặt phẳng.
Kẹp chuyên dụng: Dành cho vải, vật liệu mềm, hoặc yêu cầu đặc biệt.
Hệ thống điều khiển
Được ví như “bộ não” của robot, tiếp nhận lệnh, xử lý dữ liệu và điều khiển mọi hoạt động.
Bộ điều khiển (Controller): Máy tính công nghiệp tính toán quỹ đạo và phối hợp chuyển động.
Phần mềm lập trình: Cho phép thiết lập chuỗi thao tác, thường có giao diện trực quan, dễ sử dụng.
Giao diện người – máy (HMI): Màn hình cảm ứng hoặc bảng điều khiển giúp vận hành và giám sát robot.
Cảm biến (Tùy chọn theo mỗi ứng dụng)
Giúp robot hoạt động thông minh, an toàn và chính xác hơn.
Cảm biến thị giác: Camera + phần mềm xử lý ảnh để nhận diện, định vị sản phẩm và kiểm tra chất lượng.
Cảm biến lực/mô-men xoắn: Giúp điều chỉnh lực khi gắp, đặc biệt với vật dễ vỡ.
Cảm biến tiệm cận/quang điện: Xác định vị trí sản phẩm và hỗ trợ an toàn vận hành.
Xem thêm: Robot công nghiệp chính hãng, báo giá tốt, đủ loại
Nguyên lý hoạt động chung của các cánh tay Robot gắp sản phẩm

Nhận và xử lý tín hiệu
- Trước tiên robot tiếp nhận tín hiệu báo hiệu sẵn sàng thao tác. Nguồn tín hiệu đến từ:
- Bộ điều khiển trung tâm: Gửi lệnh trực tiếp từ hệ thống sản xuất.
- Cảm biến: Cảm biến quang điện hoặc cảm biến tiệm cận phát hiện sự xuất hiện của sản phẩm tại khu vực thao tác.
- Hệ thống thị giác máy: Camera chụp ảnh vùng làm việc, gửi dữ liệu về bộ xử lý để phân tích.
- Sau khi tiếp nhận, bộ điều khiển của robot phân tích thông tin, quyết định hành động kế tiếp.
Robot xác định vị trí và đối tượng
Với loại sản phẩm ở vị trí cố định: Robot được lập trình sẵn tọa độ, chỉ cần di chuyển đến vị trí đó để gắp.
Với loại sản phẩm di chuyển hoặc vị trí thay đổi: Hệ thống camera và phần mềm xử lý hình ảnh nhận dạng loại sản phẩm, tính toán tọa độ X, Y, Z và hướng của nó trong không gian. Đồng thời thực hiện bước kiểm tra chất lượng nếu cần.
Robot di chuyển đến điểm gắp sản phẩm
Bộ điều khiển lập kế hoạch quỹ đạo tối ưu để cánh tay robot di chuyển từ vị trí hiện tại đến vị trí sản phẩm, đảm bảo tránh vật cản và giữ độ chính xác cao. Các động cơ tại khớp hoạt động đồng bộ, đưa đầu gắp (end-effector) vào đúng vị trí định trước.
Thực hiện thao tác gắp sản phẩm
Tùy theo ứng dụng và loại sản phẩm sẽ có cơ cấu kẹp khác nhau:
- Kẹp cơ khí: Ngàm kẹp đóng lại để giữ sản phẩm, lực kẹp được điều chỉnh để tránh làm hỏng sản phẩm.
- Kẹp hút chân không: Tạo lực hút qua giác hút để nâng sản phẩm.
- Kẹp từ tính: Sử dụng nam châm điện để hút sản phẩm kim loại.
Robot xác nhận khi đã gắp thành công thông qua cảm biến lực, cảm biến áp suất hoặc kiểm tra bằng thị giác.
Di chuyển và đặt sản phẩm
Sau khi giữ chặt sản phẩm, robot nâng lên và di chuyển theo lộ trình an toàn đến vị trí đặt, sẽ là khay chứa, băng chuyền, máy gia công kế tiếp hoặc bàn kiểm tra.
Thả sản phẩm nhẹ nhàng vào vị trí yêu cầu.
Cơ cấu kẹp được kích hoạt để thả sản phẩm:
- Kẹp cơ khí mở ngàm.
- Kẹp chân không ngắt áp suất hoặc đảo chiều để thả sản phẩm.
- Kẹp từ tính ngắt nguồn từ nguồn.
Trở về vị trí chờ ban đầu
Hoàn tất thao tác, robot quay về vị trí chờ để chuẩn bị cho chu trình tiếp theo.
Ứng dụng Robotic Pick & Place
Ngành điện tử
Lắp ráp các linh kiện nhỏ như chip, tụ điện, điện trở với độ chính xác cao.
Sắp xếp bảng mạch (PCB) vào dây chuyền sản xuất.
Đóng gói linh kiện điện tử vào khay hoặc hộp theo đúng thứ tự.
Nhà máy sản xuất thực phẩm & đồ uống
Gắp và xếp bánh kẹo, chai lọ, lon nước vào khay hoặc thùng carton.
Đóng gói sản phẩm theo kích cỡ và loại.
Xếp hàng thành pallet, chuẩn bị cho khâu vận chuyển.
Ngành ô tô
Gắp và lắp các bộ phận như bu-lông, ốc vít, gioăng cao su, bảng điều khiển.
Chuyển chi tiết từ dây chuyền gia công sang dây chuyền lắp ráp.
Đặt các bộ phận nặng vào vị trí chính xác, giảm sức lao động cho công nhân.

Dược phẩm / Mỹ phẩm
Sắp xếp lọ thuốc, vỉ thuốc, hộp mỹ phẩm vào dây chuyền đóng gói.
Gắp và đặt sản phẩm vào khay tiệt trùng hoặc máy dán nhãn.
Xử lý các sản phẩm nhỏ, yêu cầu độ sạch và an toàn cao.
Kho bãi & Logistics
Phân loại hàng hóa theo đơn hàng.
Gắp và đặt sản phẩm từ kệ vào xe vận chuyển hoặc ngược lại.
Tích hợp với hệ thống băng chuyền và AGV để tự động hóa toàn bộ quy trình xuất – nhập hàng.

Xem thêm: Ứng Dụng Robot Picking & Packing Trong Dây Chuyền Tự Động Hóa Công Nghiệp
Myrobot.asia – chuyên phân phối các loại robot công nghiệp, đồng hành cùng bạn kiến tạo dây chuyền thông minh, hiệu quả và đột phá.
MYROBOT - Chúng tôi là chuyên gia trong mảng sản xuất, cung cấp và phân phối các hệ thống thiết bị robot phục vụ công nghiệp...Được khách hàng tin dùng tại Việt Nam.![]()
Bài viết liên quan
Cobot là gì? Những thông tin tổng quan về cobot không nên bỏ qua
Trong kỷ nguyên công nghiệp 4.0, các doanh nghiệp ngày càng chú trọng đến việc [...]
Th7
Hệ thống robot đóng gói sản phẩm – Giải pháp tiết kiệm chi phí cho doanh nghiệp
Hiện nay, triển khai & ứng dụng hệ thống robot đóng gói sản phẩm trở [...]
Th5
Hệ thống robot gắp bao, bốc xếp lên pallet tự động cho nhà máy hiện đại
Trong các ngành sản xuất hiện nay, nhu cầu tự động hóa quy trình đóng [...]
Th5
Tất tần tật về robot tháo dỡ, bốc xếp hàng hóa lên pallet tự động
Hiện nay, các doanh nghiệp hoạt động trong lĩnh vực thực phẩm, nước giải khát, [...]
Th5
Robot bốc xếp hàng hóa – Giải pháp tự động hóa hiệu quả cho doanh nghiệp
Trong bối cảnh các doanh nghiệp đang đẩy mạnh chuyển đổi số & tối ưu [...]
Th5
Giải pháp Robot Packing đóng gói tự động cho dây chuyền sản xuất
Trong thời đại công nghiệp 4.0, các doanh nghiệp sản xuất không ngừng tìm kiếm [...]
Th5