TIN TỨC
ROBOT CÔNG NGHIỆP – KHÁI NIỆM VÀ THUẬT NGỮ

Th3
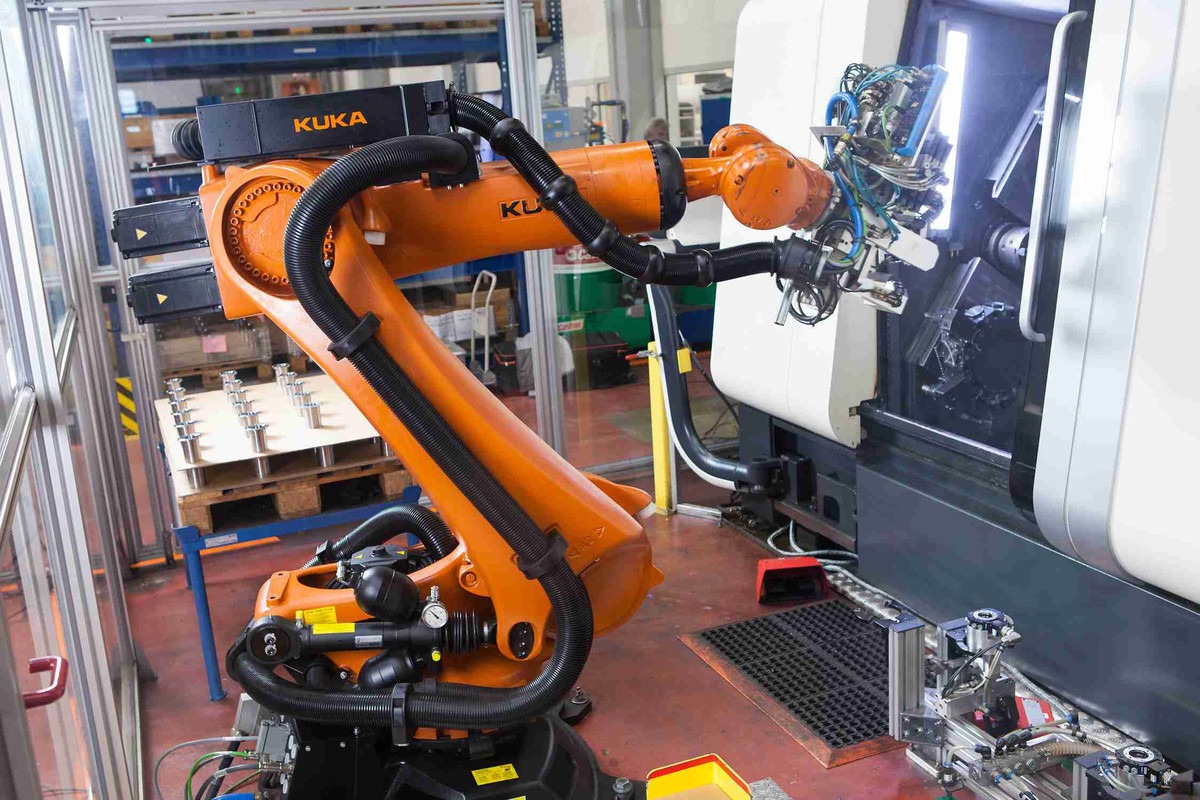
Robot công nghiệp (Industrial robots) được sử dụng nhiều nhất trong các nhà máy sản xuất tự động bao gồm: robot có khớp nối (loại thông dụng nhất), SCARA robot và gantry robot (thường gọi là robot tọa độ đề-cac hay robot x-y-z).
Đa số các robot công nghiệp đều được phân chia theo đặc tính của tay robot. Các robot thông dụng nhất hiện nay là robot có khớp nối (Articulated robot). Theo dõi để không bỏ lỡ những nội dung quan trọng trong bài viết dưới đây của Myrobot.
ROBOT CÓ KHỚP NỐI LÀ GÌ?
Là robot có những khớp quay. Robot có khớp có thể có hai kết cấu nối với nhau rất đơn giản đến những hệ thống có tới hơn 10 kết cấu tương tác với nhau. Chúng có thể dùng để nhấc các chi tiết nhỏ với độ chính xác cực cao. Các robot thường được dùng để làm các nhiệm vụ như hàn, cắt, sơn, lắp ráp, gắp chi tiết, đánh bóng,v.v …
MỘT SỐ THUẬT NGỮ ROBOT CÔNG NGHIỆP
Number of Axes (Số Lượng Trục)
Cần có ít nhất hai trục để đi đến bất kỳ một điểm nào trên mặt phẳng. Ba trục là ít nhất để đi đến bất kỳ một điểm nào trong không gian. Để có thể điều khiển một cách toàn diện sự di chuyển ở điểm cuối của tay robot (cổ tay robot) cần phải có thêm 3 trục nữa (xoay, dốc và trệch – roll, pitch, yaw) .
Carrying Capacity (Tải Trọng)
Khối lượng mà robot có thể nâng
Kinematic (Động Học)
Sự sắp xếp thực tế của các kết cấu cứng và các khớp trong robot công nghiệp quyết đinh khả năng di chuyển của robot. Robot được chia theo động học thành các loại Robot có khớp, Robot đề các, song song và SCARA
Speed (Tốc Độ)
Tốc độ robot di chuyển phần cuối của tay( cổ tay robot)
Working Envelope (Tầm Hoạt Động)
Tầm không gian xa nhất mà robot có thể “với” tới.
Xem thêm: CÁNH TAY ROBOT VÀ NHỮNG ĐỀU CẦN BIẾT
Accuracy (Độ Chính Xác)
Độ chính xác khi di chuyển đến 1 điểm bất kỳ được ra lệnh. Độ chính xác có thể khác nhau khi ở những tốc độ và vị trí khác nhau trong cùng một tầm hoạt động.
Motion Control (Kiểm Soát Di Chuyển)

Trong một số ứng dụng ví dụ như những ứng dụng gắp – đặt đơn giản. Robot công nghiệp chỉ di chuyển lặp đi lặp lại đơn thuần đến một số điểm đã được lập trình sẵn. Với những ứng dụng phức tạp hơn, ví dụ như hàn hồ quang, phải có sự kiểm soát di chuyển liên tục để robot di chuyển theo các đường trong không gian.
Power Source (Nguồn)
Một số robot dùng động cơ điện, một số khác dùng động cơ thủy lực. Loại dùng động cơ điện thì nhanh hơn. Robot dùng động cơ thuỷ lực thì mạnh hơn và có ưu thế hơn trong một số ứng dụng như phun sơn, khi mà tia lửa điện có thể gây nổ.
Drive (Truyền Động)
Một số robot kết nối động cơ với các khớp qua các thiết bị, một số khác kết nối thẳng động cơ vào các khớp.
Nguồn bài viết: Tham khảo từ internet
XEM THÊM: CÁNH TAY ROBOT CÔNG NGHIỆP
MYROBOT - Chúng tôi là chuyên gia trong mảng sản xuất, cung cấp và phân phối các hệ thống thiết bị robot phục vụ công nghiệp...Được khách hàng tin dùng tại Việt Nam.![]()
 Vòng quay may mắn
Vòng quay may mắn Hotline: 02838425001
Hotline: 02838425001 Messenger
Messenger Tư vấn báo giá
Tư vấn báo giá Địa Chỉ
Địa Chỉ
Bài viết liên quan
Cách kiểm tra xuất xứ hàng hóa qua giấy C/O
Khi xuất khẩu hàng hóa từ một quốc gia sang một quốc gia khác đòi [...]
Th4
Các trường hợp không chịu thuế xuất nhập khẩu theo quy định pháp luật
Bên cạnh các trường hợp phải nộp thuế xuất nhập khẩu thì pháp luật còn [...]
Th4
LoRaWAN Là Gì? So Sánh LoRaWan Và LoRa: Điểm Khác Biệt Cơ Bản Nhất
Trong kỷ nguyên của công nghệ hiện đại, mô hình IoT (Internet of Things) có [...]
Th4
Tổng quan SCADA (Supervisory Control and Data Acquisition System)
SCADA là từ viết tắt của cụm từ Supervisory Control and Data Acquisition System. Nghĩa [...]
Th4
Mosfet Là Gì? Đặc Điểm, Cấu Tạo Và Nguyên Lý Hoạt Động Của Mosfet
Bạn đang trong quá trình tìm hiểu về MOSFET, tuy nhiên vẫn chưa thực sự [...]
Th4
MODBUS là gì? Giao thức truyền thông MODBUS RTU, TCP, ASCII
Trong ngành tự động hóa và điều khiển, thuật ngữ “Modbus” thường được đề cập [...]
Th4